UNSERE ABTEILUNGEN FÜR IHRE GESUNDHEIT
ANTWORTEN AUF DIE HÄUFIGSTEN FRAGEN
Zuzahlung
Die GKV übernimmt in den meisten Fällen nur die Kosten für ein Standardprodukt. Entscheiden Sie sich für ein alternatives Produkt (z.B. andere Farbe, anderes Material, anderer Hersteller), wird Ihnen die Kostendifferenz als sogenannte wirtschaftliche Aufzahlung in Rechnung gestellt.
Termine
Grundsätzlich benötigen Sie keinen Termin. Kommen Sie einfach während unserer Öffnungszeiten vorbei, wir beraten und versorgen Sie gerne. Eine Ausnahme stellen die Leistungen des Fußkompetenzzentrums (Fußsprechstunde, Bewegungsanalyse, Schuhberatung u.a.) dar. Hier geht’s zu Ihrem Ansprechpartner.
Lieferzeiten
Die Lieferzeiten sind von mehreren Faktoren abhängig. Zum einen sind einige Hilfsmittel von der Genehmigung zur Kostenübernahme durch die Krankenkasse abhängig. Danach kommt es auf die Lieferzeit der Hersteller an, bzw. ob Sonderbauten am Hilfsmittel montiert werden müssen. Die Lieferzeit ist daher versorgungsabhängig.
Rezepte
Ihr Rezept ist 28 Tage gültig. Wir benötigen in jedem Fall das Original. Nach Absprache kann das Rezept aber auch vorab gefaxt oder gemailt, nachträglich abgegeben oder per Post zugeschickt werden.
WIR HALTEN SIE AUF DEM LAUFENDEN
KONTAKTIEREN SIE UNS!
Sollten Sie Fragen, Wünsche, Kritik oder Anregungen haben, lassen Sie uns dies bitte wissen. Wir freuen uns über Ihren Anruf, Ihr Schreiben per Post bzw. E-Mail oder Ihren Besuch in einer unserer Filialen.
BOS Orthopädische Werkstätten GmbH
Am Urbicher Kreuz 11 | 99099 Erfurt
Tel: (0361) 4377-0 | Fax: (0361) 4377-250
E-Mail: info@bos-erfurt.de
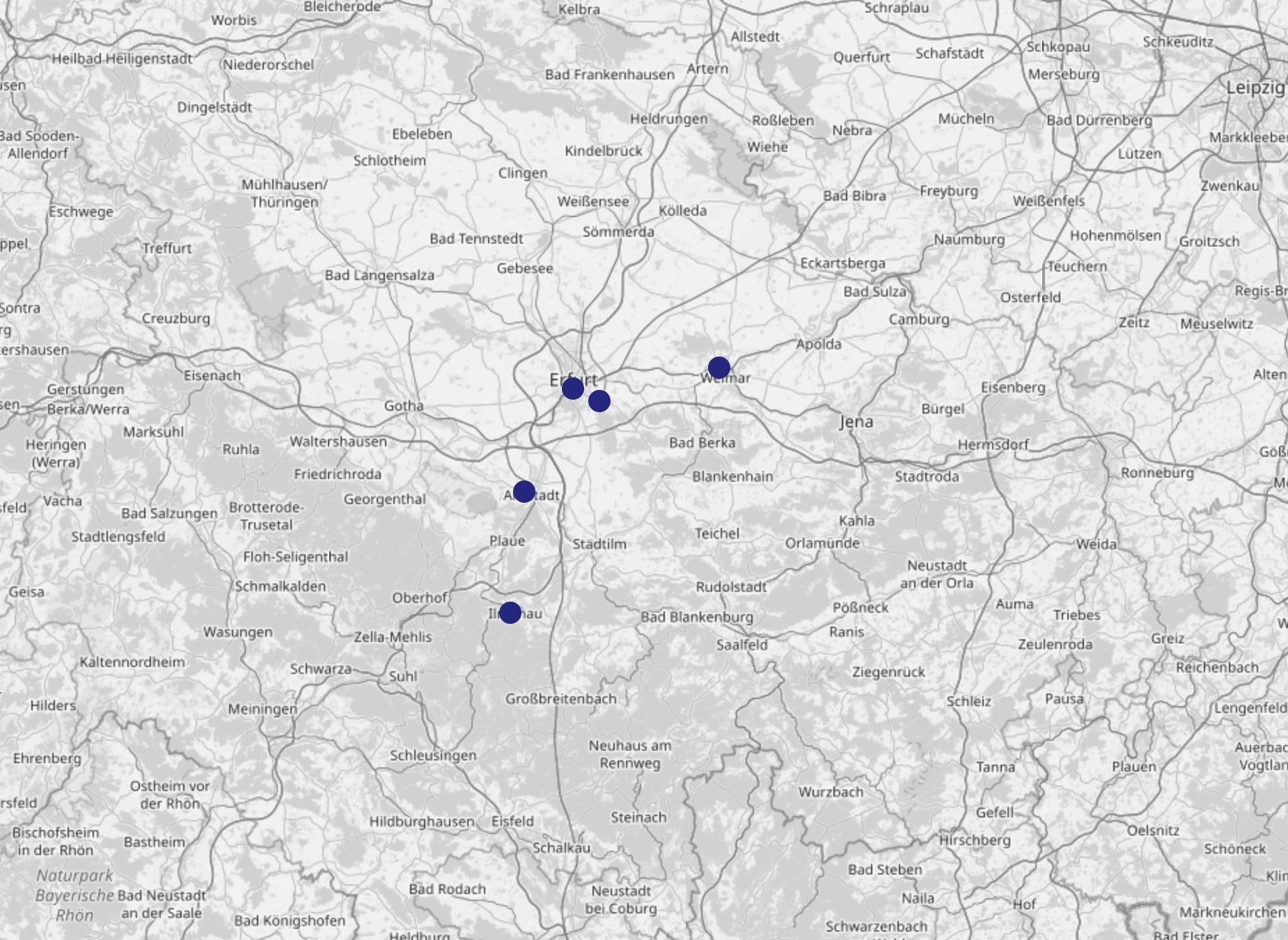
BOS Weimar, Friedrich-Ebert-Straße 58, 99423 Weimar Route planen
BOS Zentrale, Am Urbicher Kreuz 11, 99099 Erfurt Route planen
BOS Erfurt, Tschaikowskistraße 24, 99096 Erfurt Route planen
BOS Arnstadt, Wachsenburgallee 12, 99310 Arnstadt Route planen
BOS Ilmenau, Lindenstraße 5, 98693 Ilmenau Route planen